Before we begin, I would like to clarify I was rather divided on where exactly to post this continuation. Ultimately I decided to post this here since it is closely related with the prior discussion. My justification is that the late multicellular editor and aware editors as they currently stand are functionally the same, with the aware editor having precedence should plans of the multicellular stage change. (Should I be wrong, feel free to split the topic elsewhere and give me a firm slap on the head.)
So recently we had another discussion on the 3D editor, particularly focused on how we might streamline it to be more readily accessible to autoevo. While freeform sculpting is great, a common fear is that autoevo will be unable to properly utilize the feature and be stunted as a result compared to the player’s abilities.
As a result, I have come up with a potential method that could be more easily utilized by both autoevo and players that I will refer to as the “Silhouette Method”.
Instead of slowly sculpting the limbs and torso in freeform using blobs or whatever else, we could instead allow players to shape the various parts of their organism by drawing/assembling a silhouette shape in the editor with either a top-down or side-view depending on the part. This could be performed either by arranging provided shapes into the desired form, or by some method of drawing.

Shaping the Torso:
The torso section is the foundation of the 3D organism, and is on which all other parts will be attached.
The colonial bodyplan created in the multicellular stage will serve as the initial silhouette (Top-down view) from which the torso will be formed. From there the player can further shape or reshape their torso through this system, after which they may further adjust their shape through sliders to reach the desired profile.
Shaping the Limbs:
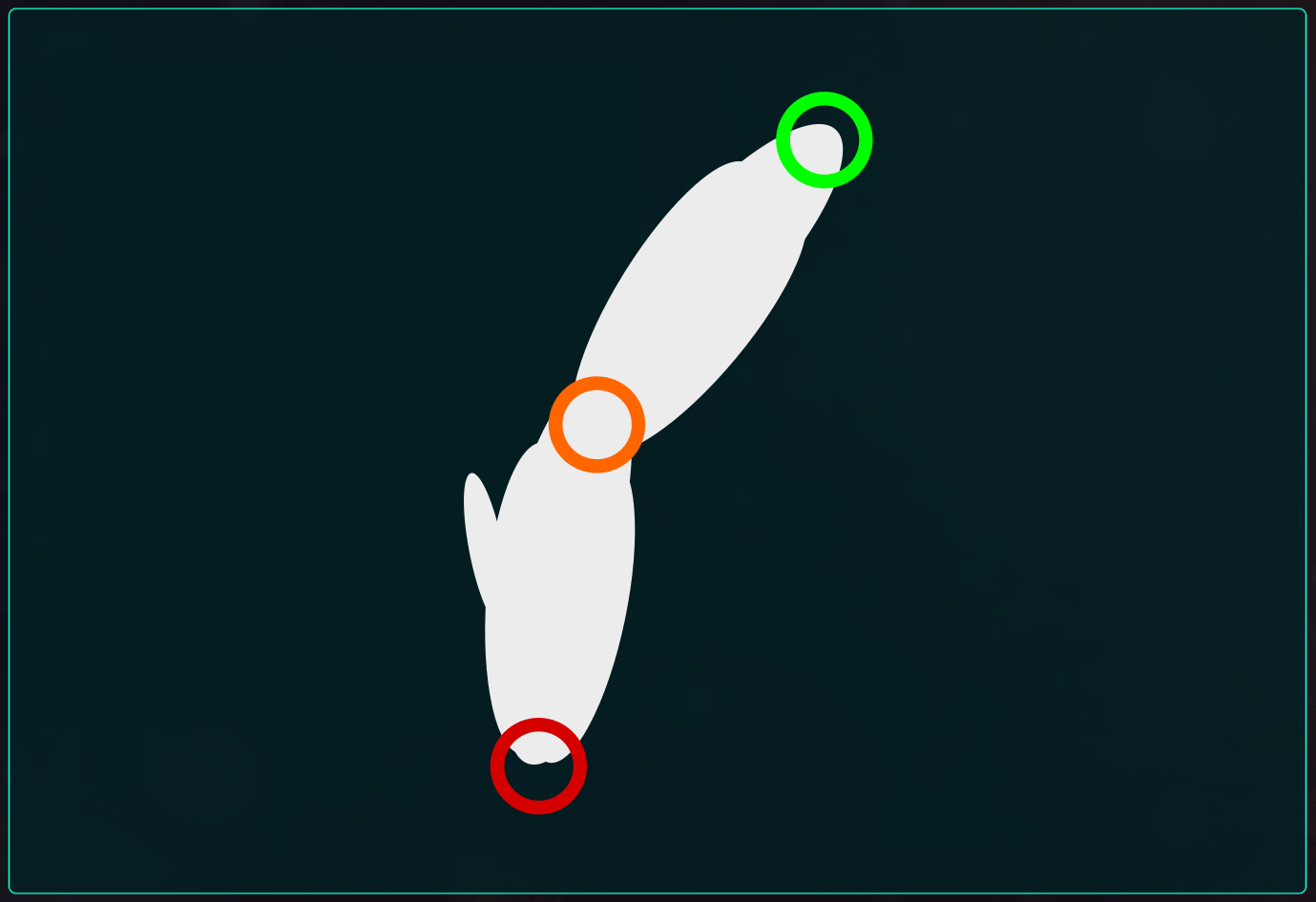
Unlike the torso, limbs will need to be placed and will have the preset initial shape of a mere nub of flesh from which the rest of the limb will be sculpted. Limbs will also feature three points of articulation; Attachment Point, Joints, and the Terminus (Where the hand/foot goes idk what to call it).
The attachment point is simply the end of the limb that is attached to the torso. Joints are probably self explanatory, being points of articulation along the limb. And the terminus is the end of the limb where the foot or hand will be attached. Feet and hands are currently separate from limbs in this concept due to the addition of phalanges which will likely utilize a different animation system.
After placing the initial limb, the limb’s silhouette may be further altered from a side-view via the placement of basic shapes or some manner of drawing method. Joints may be freely attached to each segment, with the final joint becoming the terminus until a new segment is created.
The limb may be further altered via sliders to adjust the thickness or other features once the silhouette is complete.

Applying organs and details:
With the limbs and torso sculpted, the basic shape of the organism should be largely complete. The remaining parts, barring more potentially complex moving organs such as mouths, should be easily sculpted in a similar manner and subsequently placed upon the limbs or torso inside, or outside, to perform whatever function is needed based on their constituent cells.
With the ability to sculpt the organism on a 2D basis that is then translated to a 3D medium, I believe that the 3D environment will be much more accessible to autoevo by allowing it to place basic shapes in a manner not disimilar to placing parts in the cell editor.
However, this concept is still rather rough around the edges, and many topics remain untouched.
We will need to;
Determine how parts such as mandibles, hands, feet, etc will be formed and shaped.
Decide on how to assign MP costs to the silhouette sculpting system.
Determine how parts might be duplicated for symmetry purposes.
Consider what tools and shapes would be provided for use in the silhouette sculpting window.
And possibly more that I have yet to consider.
In regards to other’s contributions to this subject,
Nunz has stated in regard to limb function calculations:
“For legs you must calculate gait to determine walk/run speed. More broadly you must estimate how much force/leverage a limb can apply along a certain vector since every known limb is, mechanically speaking, a lever to include fins and tentacles.”
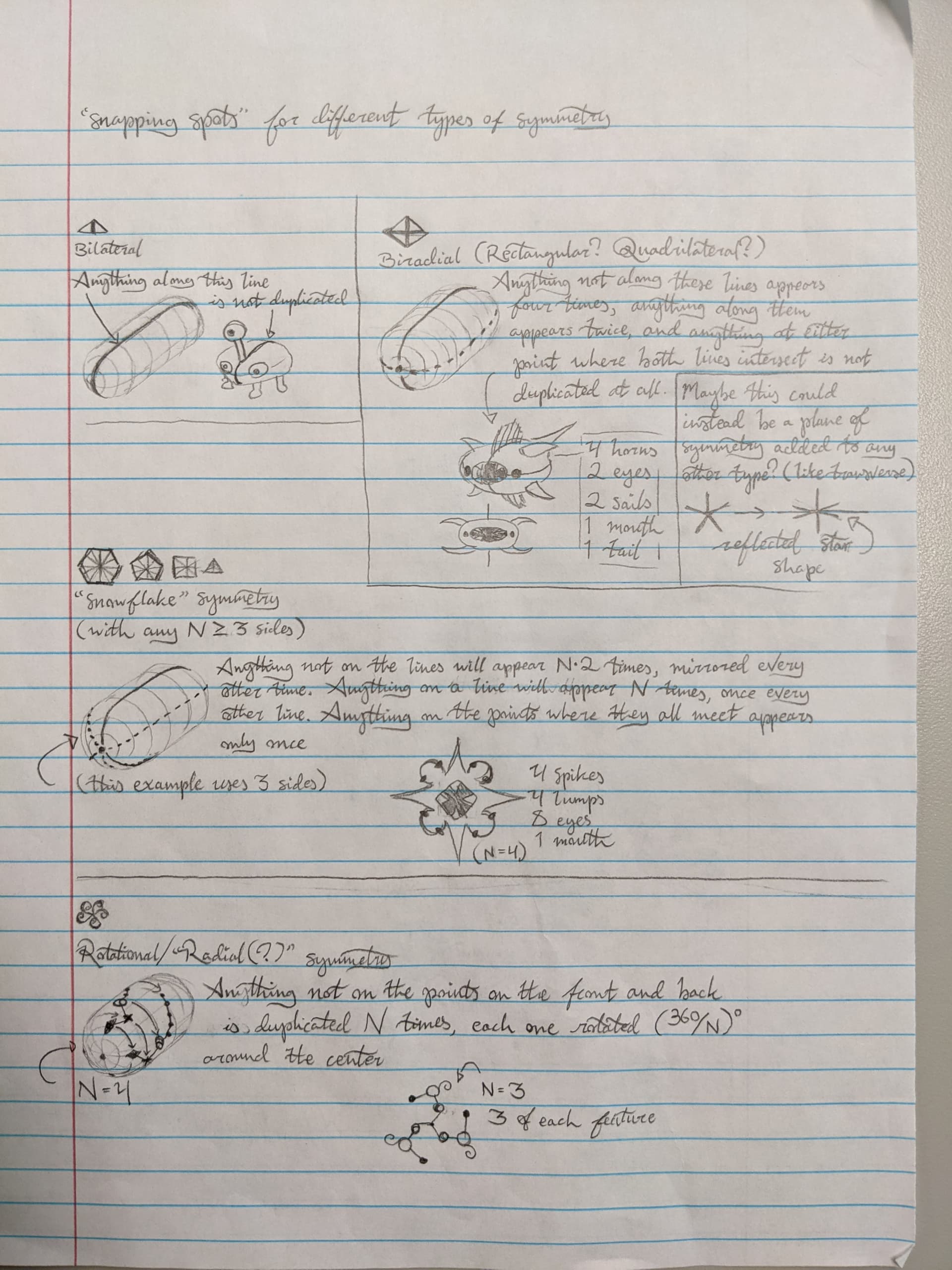
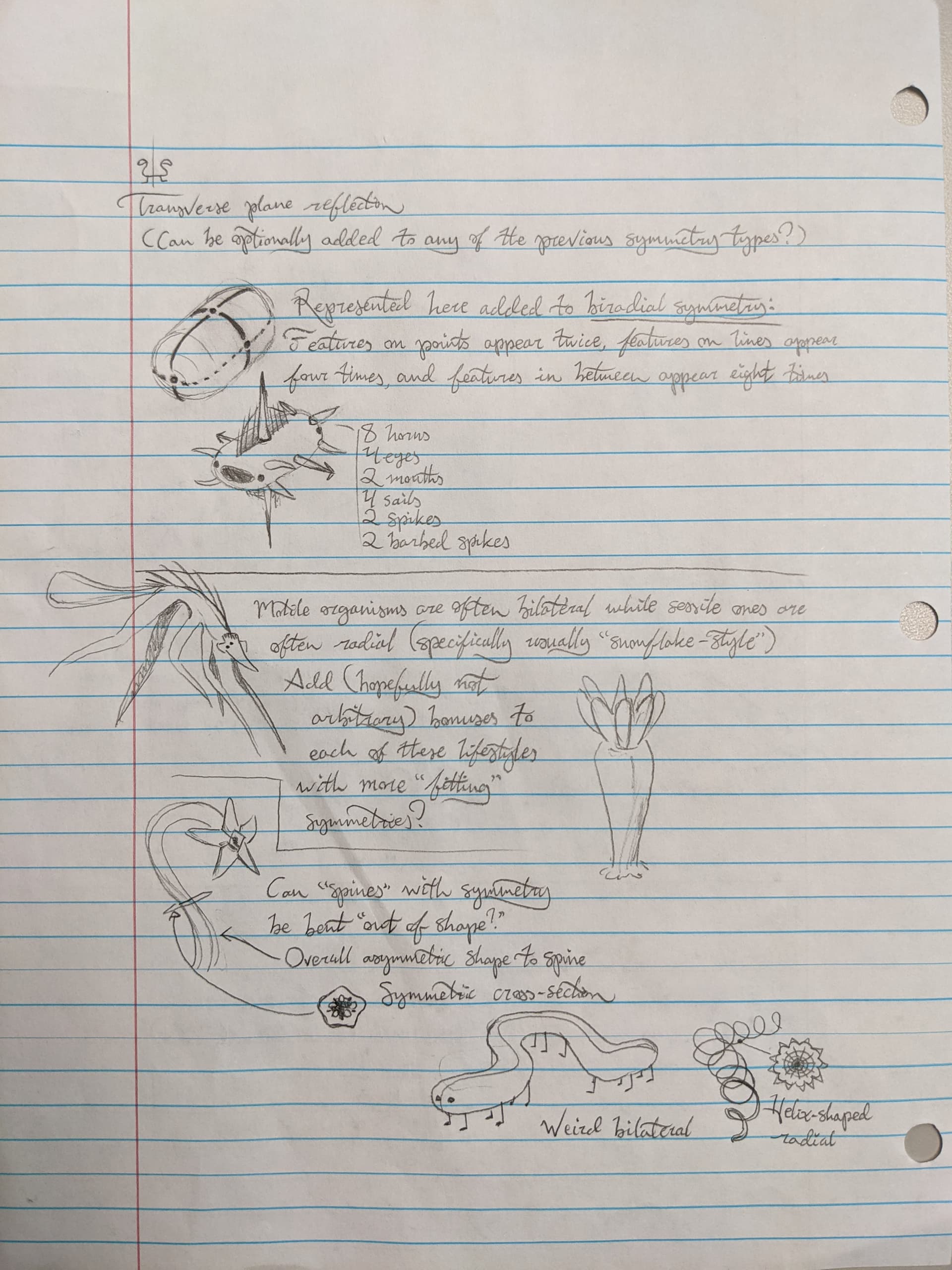
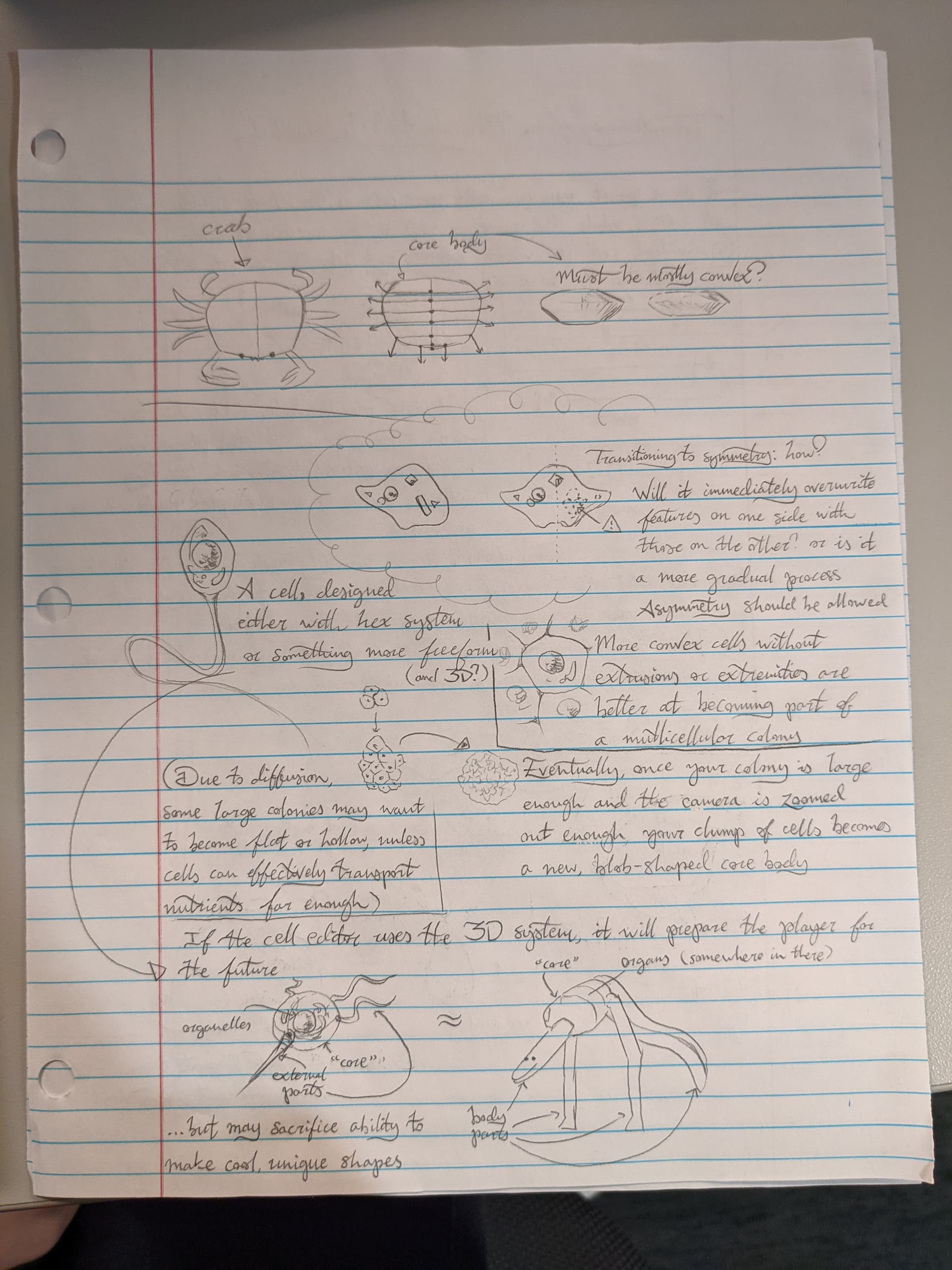
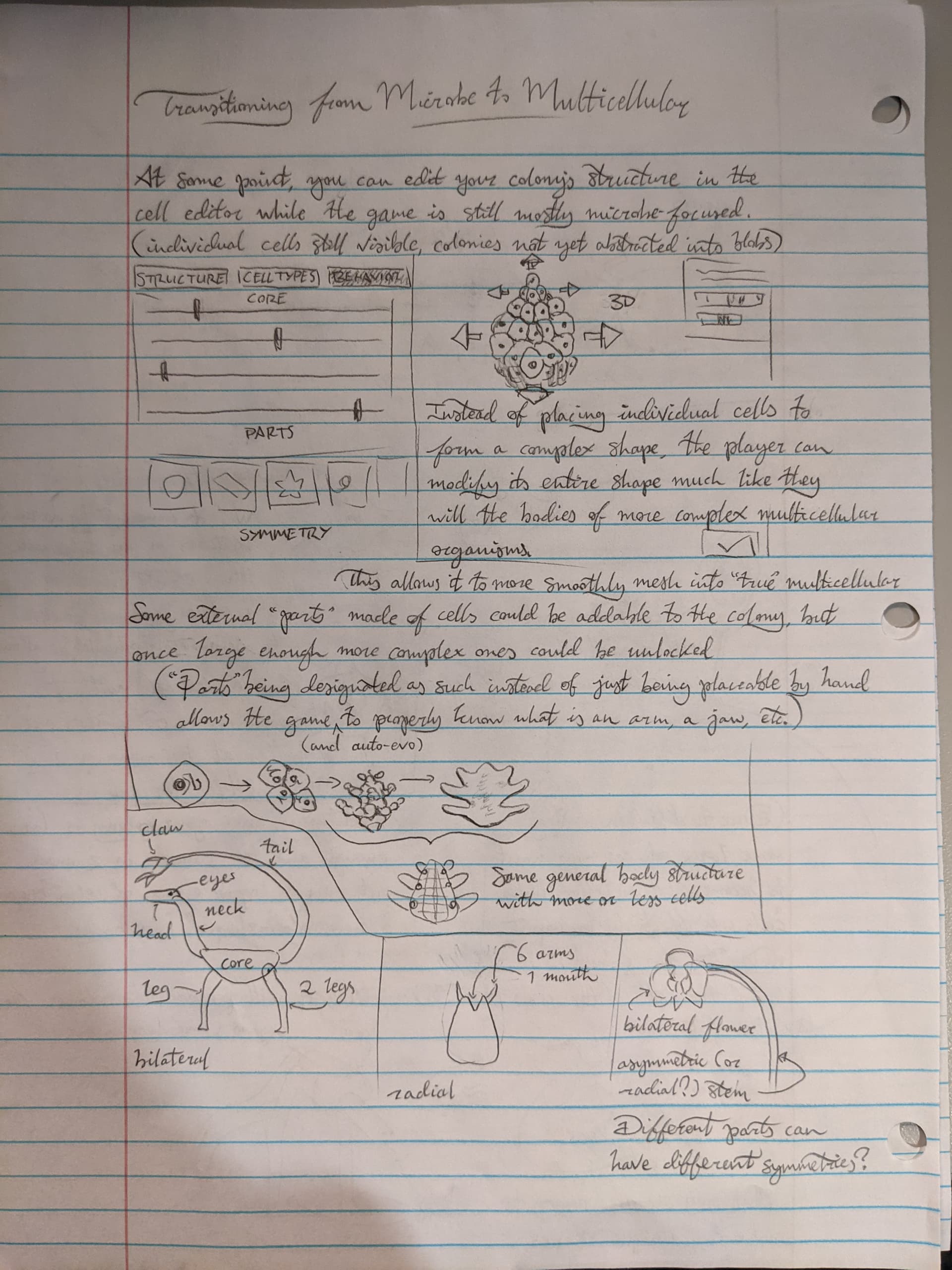
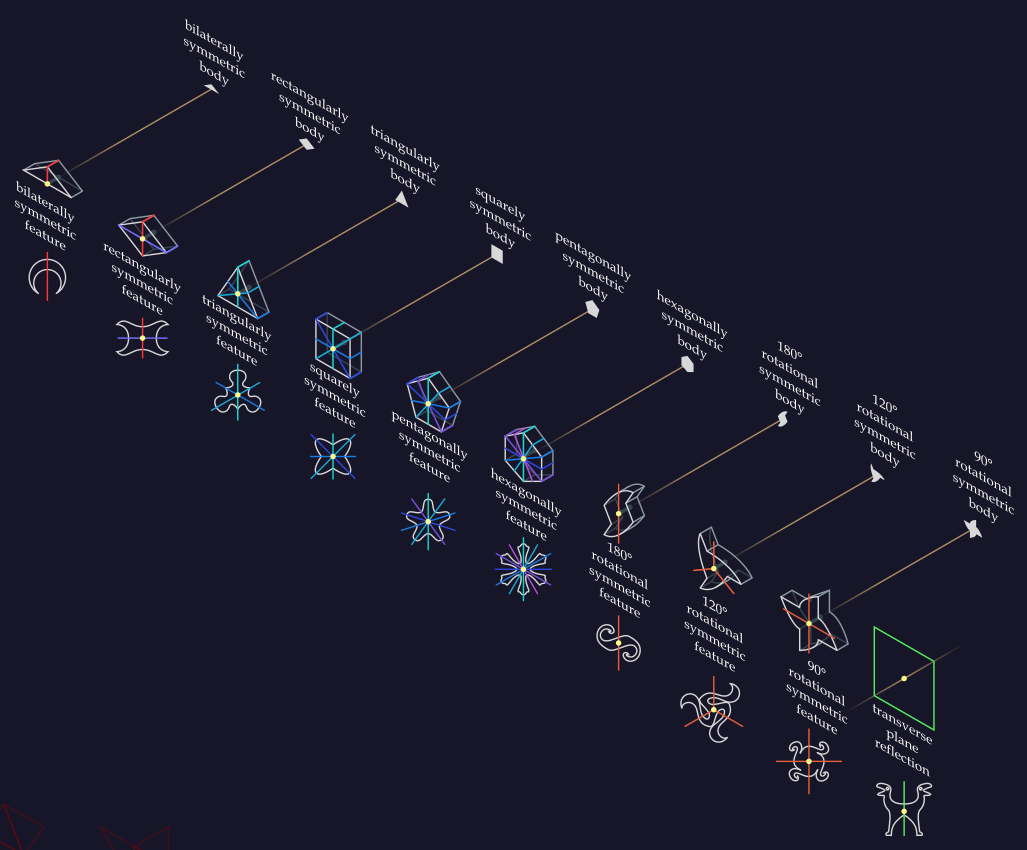
Narotiza has pursued concepts in symmetry applies to this medium, as well as how to transition to it from microbial origins, and how to transition from asymmetry to symmetry.
With more brainstormed concepts provided in the following spoiler.